
|
<< H E X A P O D II >>> Modélisation 2D |
Problématique :
Etudier
la simulation d’avancement d’une patte, afin de déterminer :
·
Le déplacement (en mm)
·
L’élévation (en mm)
1) Nomenclature
| 11 | 2 | Disque |
| 10 | 1 | bouchon |
| 9 | 1 | Biellette |
| 8 | 2 | servo moteur |
| 7 | 1 | pièce P7 |
| 6 | 1 | pièce P6 |
| 5 | 1 | pièce P5 |
| 4 | 1 | pièce P4 |
| 3 | 6 | pièce P3 |
| 2 | 1 | pièce P2 |
| 1 | 1 | pièce P1 |
| Répertoire | Nombre | Désignation |
2) Les ensembles cinématiques
Pour répondre à la problématique nous avons du étudier les liaisons entre les pièces des ensemble cinématiques (un ensemble cinématique est un ensemble de pièces qui sont encastrées les unes dans les autres. Cet ensemble constitue un ensemble indéformable puisque les pièces sont fixes les unes par rapport aux autres).
Ensemble 1 : bouchon & pièce P4
Ensemble 2 : pièce P6 (X 2)
Ensemble
4 : biellette
Ensemble
5 : Pièce P3 & servo d’avancement & d’élévation
Ensemble
6 : pièce P5 & pièce P6
Après avoir étudier les différentes liaisons entre les ensembles cinématiques on reporte ces informations sur le graphe des liaisons où les segments entre les ensembles représentent les liaisons.
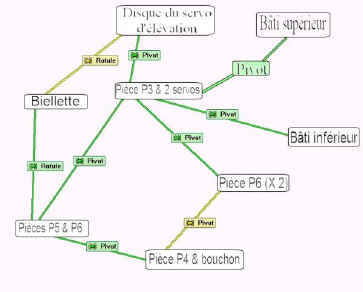
En
utilisant le plus possible la représentation normalisée et en respectant les
orientations des liaisons, on réalise une représentation schématique des
liaisons.
L’intérêt de ce schéma est de modéliser et de simplifier la réalité afin de mieux comprendre ou expliquer le fonctionnement d’un mécanisme, ici une patte de l’Hexapod.
Þ Nous pouvons maintenant passer au modelage en 3 dimensions de la patte.