 |
PARTIE ELECTRONIQUE
LA PIECE MAITRESSE DU AROBOT:
Le controlboy 3 est un automate complètement indépendant avec un microprocesseur, une mémoire vive, une mémoire EEPROM, des entrées analogiques et digitales, et des sorties digitales. Au milieu entre le entrées et les sorties se trouve le microprocesseur qui mesure, interprète et contrôle tout. Avec le logiciel, qui tourne sur un P.C., on écrit des petits programmes. On connecte la cible à une ligne série du P.C. et charge le programme dans l'EEPROM sur la carte. Si on déconnecte maintenant controlboy du P.C., le programme reste intact dans l'EEPROM et travaille indépendant du P.C.
programmation
La programmation du controlboy est faite à l'aide de l'algorithme :
_EXEMPLE DE PROGRAMME :
TOTO = TOTO + 1 incrémente la variable de "toto" de "1". Vous pouvez faire toute sorte d'opérations
Exemple:
TOTO =10
TOTO=TOTO+1
PRINT "TOTO=";TOTO
LE RESULTAT AFFICHE SERA TOTO=11
PROGRAMMATION DU AROBOT:
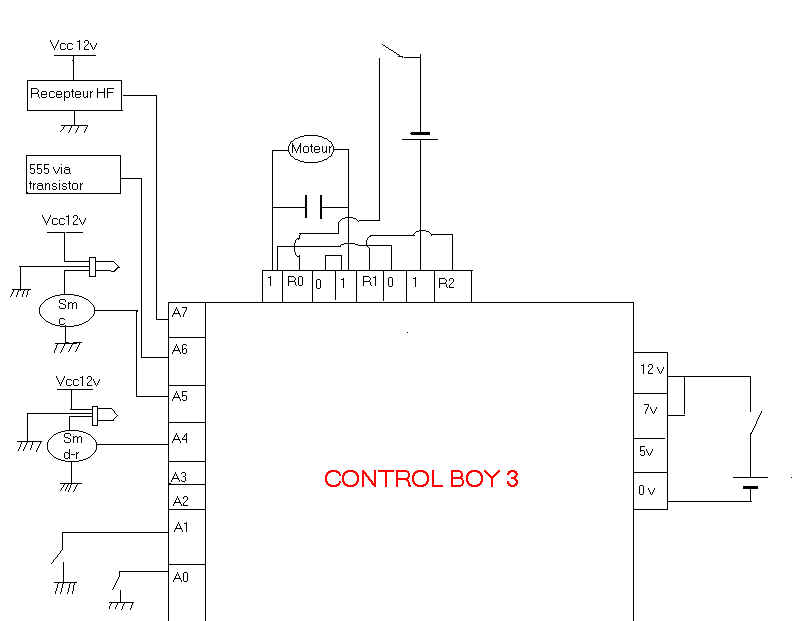
SCHEMA DU AROBOT:
SCHEMA STRUCTUREL:
|
Sm c: servo moteur pour diriger la caméra
Sm d-r: servo moteur direction pour diriger le véhicule
Moteur: pour faire avancer ou reculer le véhicule
Récepteur HF 433 MHz: récepteur télécommande pour le contrôle à distance
Emetteur Video HF : 224,5 MHZ (monté avec la caméra sur le servo moteur)
PONT EN H:
 |
Le pont en H permet de faire tourner le moteur dans un sens ou dans l'autre (avancer ou reculer) selon la position des interrupteurs.
Par exemple dans le schéma de gauche le moteur tourne dans un sens "positif" et dans celui de droite le moteur tourne dans l'autre sens "négatif".
EMETTEUR AUREL:
 |
L'émetteur AUREL 433 MHz est branché à l'ordinateur. On peut à partir de l'ordinateur envoyer des informations via l'émetteur vers le récepteur AUREL qui capte l'information et la convertie afin d'éxécuter la commande envoyée.
RECEPTEUR AUREL:
 |
Le récepteur AUREL capte l'information envoyée par l'émetteur et la convertie afin d'éxécuter la commande envoyée.
EMETTEUR ULTRA SON:
 |
Le principe est d'utiliser un émetteur à ultrasons placé sur le
robot, puis, on mesure le temps que les ultrasons mettent à arriver au récepteur.
Nous avons ainsi des rayons, et à l'intersection de ces rayons se trouve le robot!
Mais pour pouvoir mesurer le temps mis par les ultrasons, il faut bien un top départ.
RECEPTEUR ULTRA SON:
 |