| L'Arobot est un robot autonome il
est munit de deux capteurs situés à l'avant du robot permettant de
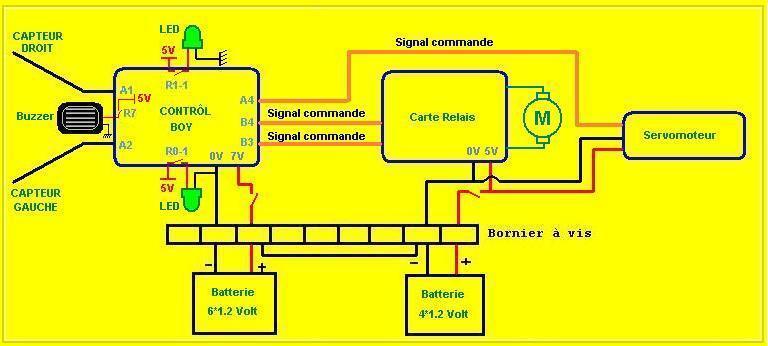
déterminer, au mieux d'éviter les obstacles qui lui sont contraints. A/ But de la programmation: Le robot doit être capable d'avancer tout en évitant les obstacles détectés par ses capteurs positionnés à l'avant de l'Arobot. Si le capteur droit est déclenché alors le robot s'arrête et tourne à gauche tout en reculant puis s'arrête à nouveau et reprend sa marche avant avec une direction rectiligne, et vis versa pour le capteur de gauche. Pour comprendre l'écriture d'une programmation voici l'exemple d'une syntaxe qui nous sera nécessaire: PORT B.0 = 1 Le "0" est le numéro de la sortie du port B et "1" est le niveau logique appliqué (correspondant à 5v en sortie) B/ Le Buzzer et les DEL: Le buzzer est une sorte d'alarme déclarant, dans le cas de ce robot, la détection d'un obstacle et la mise en route de sa marche arrière. De même pour la DEL qui s'allume selon le capteur actif. C/ Explications, schématisations et programmations des différents composant de l'Arobot: 1/ Le control-Boy 3 C'est une mini carte mère d'ordinateur capable de programmer à l'aide d'une puce EEPROM qui permet de créer ou supprimer des programmes par le biais d'un ordinateur (électricité). Le control-Boy 3 possède des entrées et des sorties destinées aux tensions, aux relais, capteurs...Pour simplifier on appellera le control-Boy 3: "microcontrôleur" (µc).
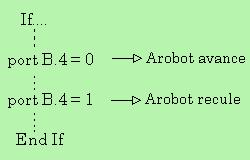
2/ Les Relais Le Relais est comparable à un interrupteur mécanique dont la manoeuvre serait non pas effectué manuellement mais à partir de l'alimentation d'une bobine de commande. Le relais permet de commuter la puissance, c'est-à-dire qu'il permet de faire tourner le moteur dans un sens ou dans un autre (marche avant ou arrière).
3/Alimentation: Pour l'Arobot on utilisera, comme source d'énergie, 6 piles de 1.5v (type AA, Lr6) pour alimenter le µc et 4 piles 1.5v (type AA, Lr6) pour alimenter la carte relais.
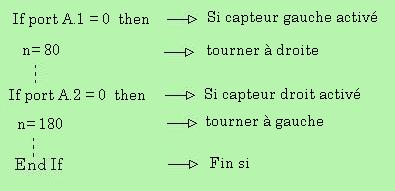
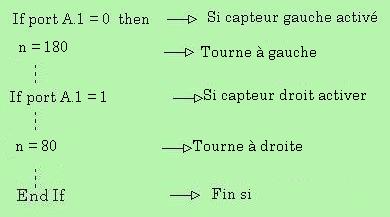
4/ Bloc capteur: Les capteurs sont reliés sur les entrées A1 et A2 du µc. Lorsqu'il y a présence d'un obstacle, le capteur est activé et passe au niveau 0. L'entrée A1 ou A2 passe au niveau 0 ce qui entraîne l'arrêt du robot, puis le robot se met à reculer et à tourner vers la droite ou vers la gauche, cela dépend du capteur qui est activé.
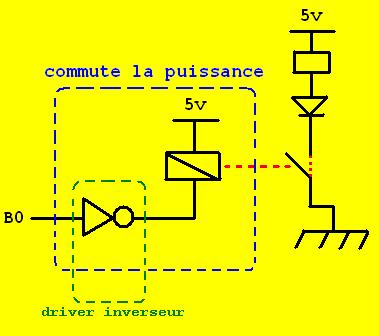
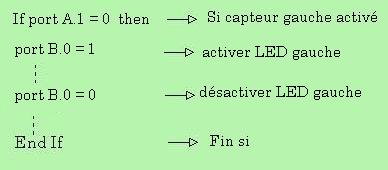
3/ Les LED (ou DEL): Les lumières sont reliées sur les sorties R0 et R1 du control Boy. Ces sorties relais sont liées aux sorties B0 et B1 du µc. Pour activer les LED le µc envoi une information de niveau 1 sur les sorties B0 et B1, ce qui entraîne la fermeture du relais R0 ou R1, donc qui permet l'éclairage de la LED. BO est relié à un driver inverseur qui permet de faire passer le "0" appliquer à B0 à "1" et vis versa...
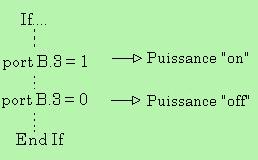
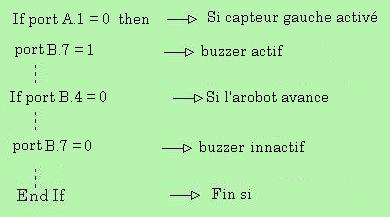
6/ Le Buzzer: Le Buzzer est relié sur le relais R7 du µc qui est contrôlé par le port B7 du microcontrôleur X68C75. Lorsqu'il y a détection d'un obstacle par l'un des deux capteurs, le port B7 passe au niveau 1 et permet au buzzer de sonner lorsque le robot détecte un obstacle et lorsqu'il recule.
7/ Le Servo-moteur: Il est relié sur le port A.4 du µc. Il permet au robot de tourner soit vers la gauche, soit vers la droite. Il permet d'assurer la direction. Un servomoteur est un moteur à courant continu avec réducteur réaliser par des engrenages et d'une commande électronique intégrée qui permet d'asservir en rotation l'arbre moteur (en sortie). Un servomoteur est muni de trois fils, dont deux pour l'alimentation, soit le Vcc et la masse, et d'un troisième pour le signal commande qui est contrôlé par le microcontrôleur. Lors du fonctionnement normal du servomoteur le microcontrôleur du contrôle boy envoie une impulsion d'une largeur déterminée qui est entre une ou deux millisecondes afin que l'axe tourne d'un angle déterminé, suivant le signal suivant :
| |||||||||||||||||||||||||||