|
 |
Le point sur les projets TPE SSI en
cours
(5 Mars 2003)
Ce point ne concerne que la partie GE !!!
Pour les thèmes de
Première SI:
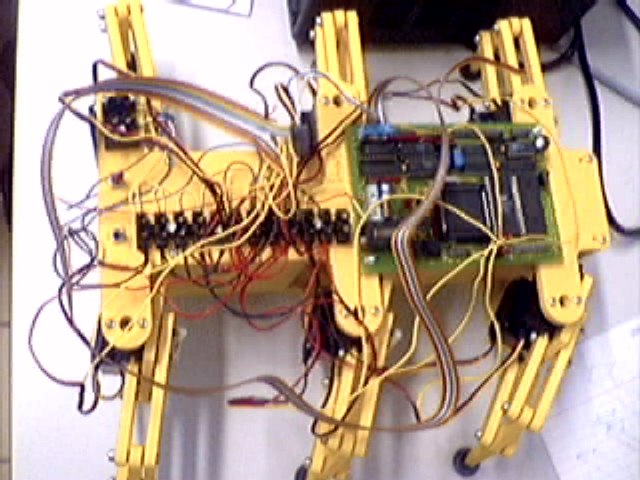
- Le ROBOT HEXAPOD II :
(19 Décembre 2002)
Léger retard sur le planning, cependant les parties mécaniques sont montées
et les câblages électriques sont en bonne voie de finition .
|
|
|
Un vrai sac de nœuds ... la
programmation ne va pas être triste !
(5 Mars 2003)
Changement des câbles d'alimentation car section trop faible (sur une
longueur de 4m). entraînant une chute de tension importante à l'arrivée.
Modification au niveau de la carte controlboy : on a viré l'uln 2003 et mis des
straps . Le signal en sortie du port B est beaucoup plus beau et on a plus
besoin des résistances de rappel (soudées pour rien ...arf...).
Le programme est en cours d'élaboration (actuellement, les élèves calibrent
les courses max/min des servos ).
RDV fin avril !
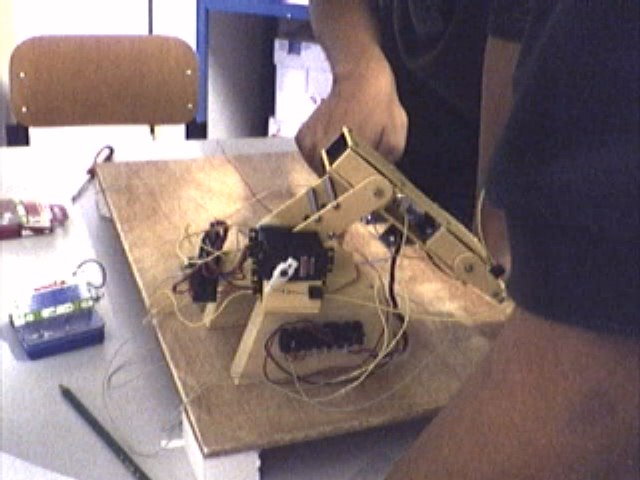
La Pince 5 axes
Léger retard sur le planning, cependant les parties mécaniques sont
montées et les câblages électriques sont en bonne voie de finition .
Quelques photos (pince 5
axes) avant les vacances de noel :
 |
 |
 |
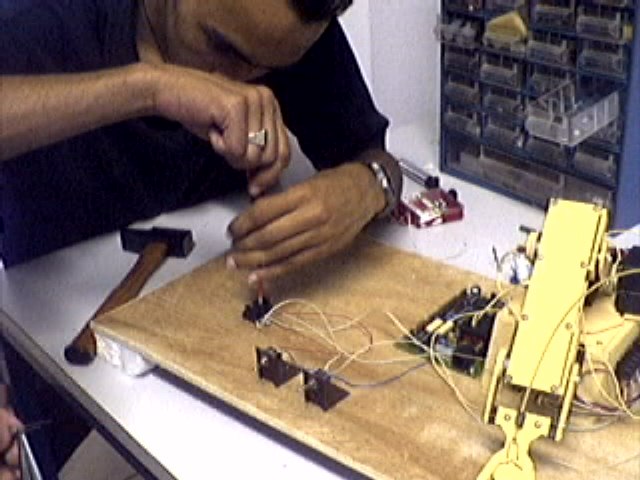 |
On perce, on visse, on colle ...
même avec les dents !
Pourtant c'est pas les outils qui manquent...
(5 Mars 2003)
Problème rencontré (une bonne loi de Murphy) : la moitié des câbles
ont dû être rallongés car calculés trop courts.
Programmation et calibrage logiciel des servos (course min/max) en cours.
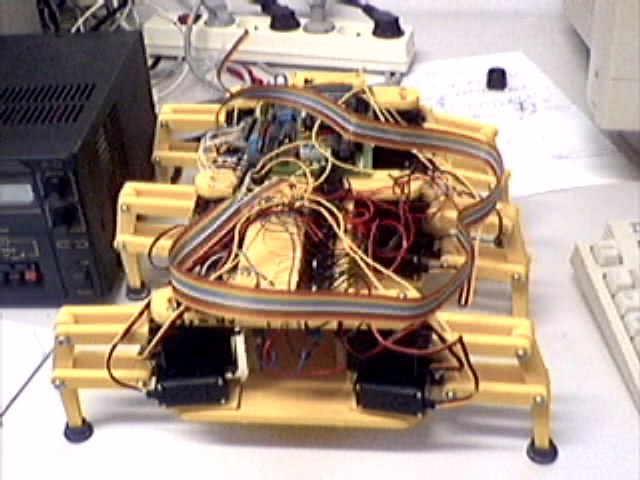
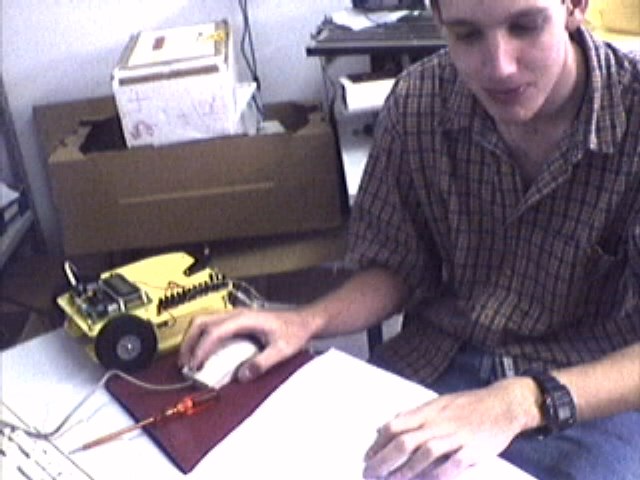
La base robot mobile 5AAKT
Pas de retard sur le planning, les parties mécaniques sont montées et les
câblages électriques sont terminés. La programmation a été attaquée sans
soucis majeur jusqu'à présent.
Les sous-routines pour le déplacement sont faites ainsi que la détection
d'obstacle .
Le robot est déjà capable de détecter et contourner l'obstacle.
Un groupe va pouvoir étudier la commande via le réseau locale ou Internet
du robot : le robot étant relié à un ordinateur du réseau, on va le
piloter à partir d'un autre ordinateur situé sur le réseau local ou externe
via internet . On a déjà une petite idée sur la façon de procéder
....
Le deuxième groupe va s'orienter vers l'ajouts de capteurs (contact et IR) pour
améliorer sa capacité à se déplacer en mode autonome.
 |
 |
(Intense réflexion de M. G. Gruchet qui attaque la programmation)
(5 Mars 2003)
Des capteurs de type contact fabrication maison ont été mis en place :
n'ayant plus de petit capteurs à microswitch en stock, on a dû
improvisé une solution qui s'avère assez efficace : on utilise deux relais
(sans le boîtier) sur lesquels sont soudés deux moustaches métalliques. Lors
d'un contact ou choc , le relais se ferme et ya plus qu'à récupérer
l'information sur les entrées du microcontrôleur.
La programmation est ok, l'engin est maintenant capable d'éviter un obstacle et
le contourner par la gauche ou la droite en fonction des capteurs activés.
Des voyants (leds pour clignotants) et un buzzer vont pouvoir être rajoutés
d'ici fin mai.
L'AROBOT
Léger retard sur le planning : les câblages électrique
sont plus long que prévu. Les relais sont soudés en fils volants et des
erreurs ont été commises à divers niveaux (mauvaise soudure, fils trop
dénudés etc ).
On a oublié aussi de rajouter un bornier pour 2 alim supplémentaires (4 alims
au total : 2*12V, 5V et 9V)
 |
 |
 |
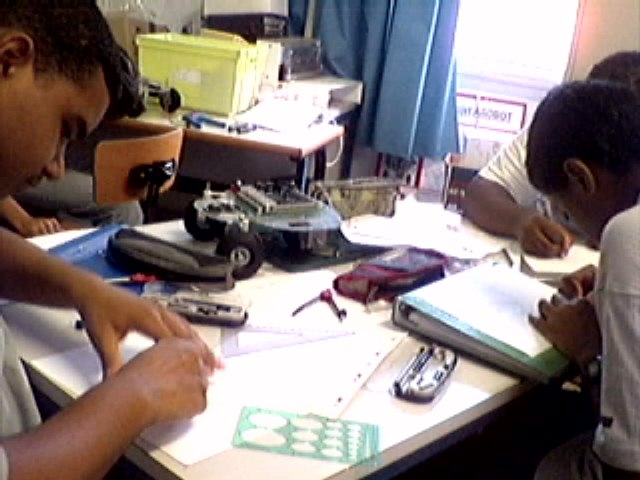 |
(faut croire que ça bosse dur en fin d'année !!!)
(5 Mars 2003)
Le câblage des relais de puissance ayant pris beaucoup trop de temps
(on fera un circuit imprimé à partir !) , le projet patine un peu au niveau
élec. La programmation n'a pas encore commencé ...
Pour les thèmes de Terminale SI:
Thème véhicule électrique
Sous thème : MOTEUR
La carte électrique (le hacheur) a été
réalisée dans les temps et sa commande par le port parallèle du PC n'a
pas posé de problème particulier. Seule la simulation avec workbench 4 (buggué
ou pas assez puissant)a donné quelques soucis. Projet OK (reste à fignoler )
Les élèves ont eu le temps de faire (en plus) un programme sur PC pour piloter
un servo-moteur via le port porallèle.
Thème Robot "Arobot" avec minicaméra
La "fusion" RLP/AROBOT a été plus longue que prévue mais le thème devrait être bouclé avant les vacances (enfin, faut espérer !).
Thème Afficheur 128 leds
Le journal lumineux fonctionnant déjà, le travail porte
essentiellement sur la présentation du projet (page web à améliorer et
algorithmes à rendre plus clair avec schéma et exemples)
La simulation avec workbench (buggué) est franchement aléatoire et c'est bien
dommage...mais sinon pas de gros problème.
Thème Robot 6 pattes
(Sous thème en GE : Boussole électronique)
Le calibrage de la boussole électronique
n'a pas été aussi simple que prévu et les élèves ont souvent perdu le nord
-:) (la boussole est très sensible et le simple fait d'utiliser une aiguille
aimantée (d'une boussole traditionnelle) à proximité (10cm) suffit pour
perturber le calibrage. Bref, il faut essayer de faire le calibrage en
s'éloignant le plus possible des appareils électriques et magnétiques ce qui
n'est pas une mince affaire dans le labo ...
Le programme informatique pour la lecture de la largeur d'impulsion générée
n'a pas posé de problème. Il faut encore faire des tests pour valider la
fiabilité de la boussole ...
Thème Charly Robot
Le thème dépasse les espérances puisqu'on peut maintenant usiner des pièces dessinées à partir de solidworks et on pourra désormais usiner des châssis de robot, ce qui coûtera nettement moins cher que de les acheter chez sélectronic ... Il faudra au préalable réaliser une mise en sécurité de l'appareil
Thème Triangulation :
Les objectifs ont été atteints (mesure de distance par ultra-son et
simulations sur ordinateur par programme en qbasic)
Les balises fonctionnent mieux que prévues (on pensait même pas avoir le temps
de tester)
il y a un problème de linéarité mais on devrait pouvoir corriger un peu par
logiciel.
Le problème de linéarité est dû apparemment à l'électronique de mise en
forme du signal, un temps de retard lié à l'atténuation du signal
apparaissant lorsque la balise est éloignée. On va essayer d'augmenter le gain
mais le problème n'est pas simple car une augmentation trop importante du gain
entraîne d'autres types de problèmes (amplification des réflexions parasites)
. Bref, ya encore des tests et des améliorations à faire !
Infos 17 décembre :
Après augmentation du gain du deuxième étage, l'élimination d'un
condensateur (juste avant le monostable) et la diminution de la largeur du train
d'impulsion (500 micro secondes au lieu d'1ms) , les balises fonctionnent sans
problème de linéarité. Les premiers tests suites aux modifs donnent une
précision d'environ 2 à 3cm sur une distance de 3m50 ... c'est pas beau
çà ?
(voir schémas ci-dessous)
Infos 19 décembre :
Intégration du programme graphique (réalisé en qbasic) pour afficher la position (X,Y) du
véhicule en temps réel .
Le moins qu'on puisse dire, c'est que c'est franchement fun : Un petit cercle
symbolise la position de l'émetteur ultra-son. En déplaçant l'émetteur, on
voit le petit cercle se déplacer sur l'écran dans la même direction
:<)
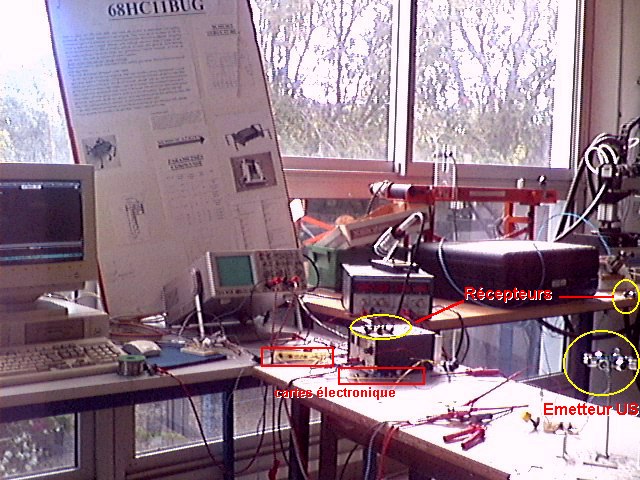
 |
 |
| Émetteur U-Son fabrication LLP | Balise Réceptrice Version 2 |
(5 Mars 2003)
Les projets ont été bouclés dans les temps et les sites sont terminés
(Voir lien en page d'accueil les
projets 2002-2003 des terminales)
Globalement, bonne prestation des élèves lors des évaluation TPE