|
Servomoteur C
Servomoteur D
Servomoteur H
Servomoteur G
Servomoteur I Servomoteur J
|
 |
Servomoteur A Servomoteur B
Servomoteur E
Servomoteur F
Servomoteur L
Servomoteur K
|
|
H E X A P O D II Câblage |
Schéma en 3D simplifié des servomoteurs de l'Hexapod II :
|
Servomoteur C
Servomoteur D
Servomoteur H
Servomoteur G
Servomoteur I Servomoteur J
|
|
Servomoteur A Servomoteur B
Servomoteur E
Servomoteur F
Servomoteur L
Servomoteur K
|
Schéma en 2D du câblage des servomoteurs sur le microcontrôleur :
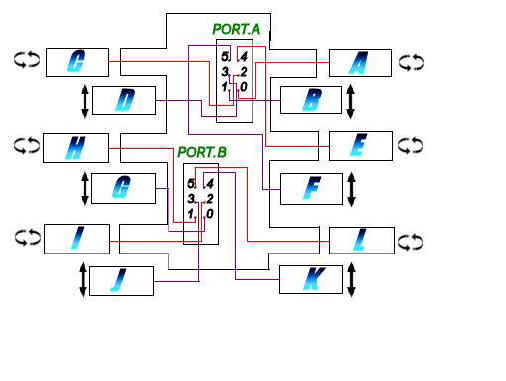
Le servomoteur A est relié au PORTA.0 du microcontrôleur, il sert à faire tourner la patte.
Le servomoteur B est relié au PORTA.1 du microcontrôleur, il sert à lever/baisser la patte.
Le servomoteur C est relié au PORTA.2 du microcontrôleur, il sert à faire tourner la patte.
Le servomoteur D est relié au PORTA.3 du microcontrôleur, il sert à lever/baisser la patte.
Le servomoteur E est relié au PORTA.4 du microcontrôleur, il sert à faire tourner la patte.
Le servomoteur F est relié au PORTA.5 du microcontrôleur, il sert à lever/baisser la patte.
Le servomoteur G est relié au PORTB.0 du microcontrôleur, il sert à lever/baisser la patte.
Le servomoteur H est relié au PORTB.1 du microcontrôleur, il sert à faire tourner la patte.
Le servomoteur I est relié au PORTB.2 du microcontrôleur, il sert à faire tourner la patte.
Le servomoteur J est relié au PORTB.3 du microcontrôleur, il sert à lever/baisser la patte.
Le servomoteur K est relié au PORTB.4 du microcontrôleur, il sert à lever/baisser la patte.
Le servomoteur L est relié au PORTB.5 du microcontrôleur, il sert à faire tourner la patte.
Chaque servomoteur est relié à la masse, à l'alimentation de 5V et au PORTA ou PORTB du microcontrôleur.
Voici le robot entièrement câblé
